In 2022, during the Christmas break, I had some time to teach the Raspberry pi to recognize objects.
I trained my system to recognize the remote control, cup, baubles and bin. To do this, I followed
instructions from the official tensorflow manual.
Prepared 300 photos of objects that I want to recognize. The problem is that for training purposes the size of
the photos should be smaller than phone's camera.
Photos should not be larger than 800x600 pixels, otherwise more computational time is needed for training.
I used the Photoshop to do this, but unfortunately after some time realized it could take hours so had to find
another way.
Decided to make my own mini application that changes the resolution of photos.
A program that allows me to change the resolution of photos in seconds is available on GitHub.
Application allow to reduce size of the photos and videos.
You can just download this app, no need to install and add the photos and videos that you want to convert to
smaller size and run
application.
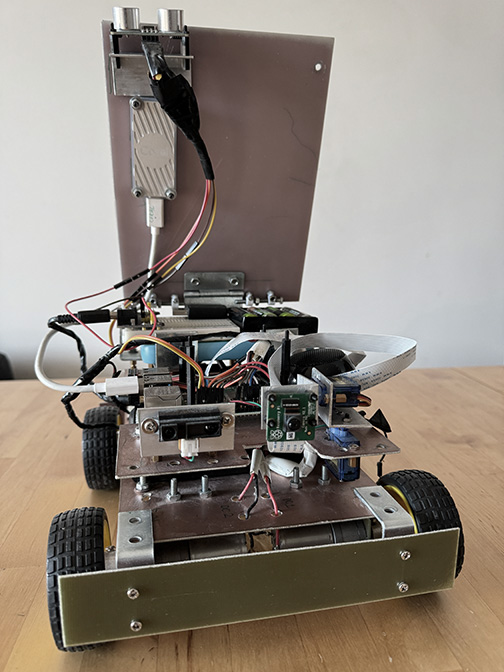
In the following videos is vision system with Raspberry pi4 (Tensorflow). Using the Coral accelerator allows
increase to 14 frames per second.